
AMSLAND
Meine FALLER - AMS - Anlage
Freud und Leid Teil 2
Als ich dann von den Fortschritten bei der Digitalisierung von Modellbahnen hörte, war ich sofort fasziniert. Jedem Fahrzeug eine Adresse geben und ihm den Fahrstrom schicken - davon hatte ich als Kind schon geträumt, natürlich ohne eine Ahnung zu haben, wie man sowas realisieren konnte.
Nun führte ich jede Menge Versuche durch, die Faller-Autos elektronisch zu steuern, erst mal mit PWM-Reglern. Schnell stellte sich heraus, daß dies eine gute Möglichkeit ist, die Langsamfahreigenschaften zu verbessern. Zusammen mit Silikonreifen konnten nun auch Steigungen und Gefälle besser befahren werden und das Kurvenverhalten war besser. Aber erst als ich die ersten Versuche mit Digitaldecodern machte, war ich überzeugt, daß dies ein Fortschritt sein könnte.
Jetzt kamen aber neue Probleme, als erstes der Umbau der Chassis. Ich verwendete Flachanker-Chassis für meine Versuche, und hier war die strikte Trennung von Fahrbahnstrom und Motorstrom schwierig zu realisieren. Einige Decoder habe ich bei diesen Versuchen zerstört, bis ich dann aufgab und mein eigenes Chassis entwickelt habe.
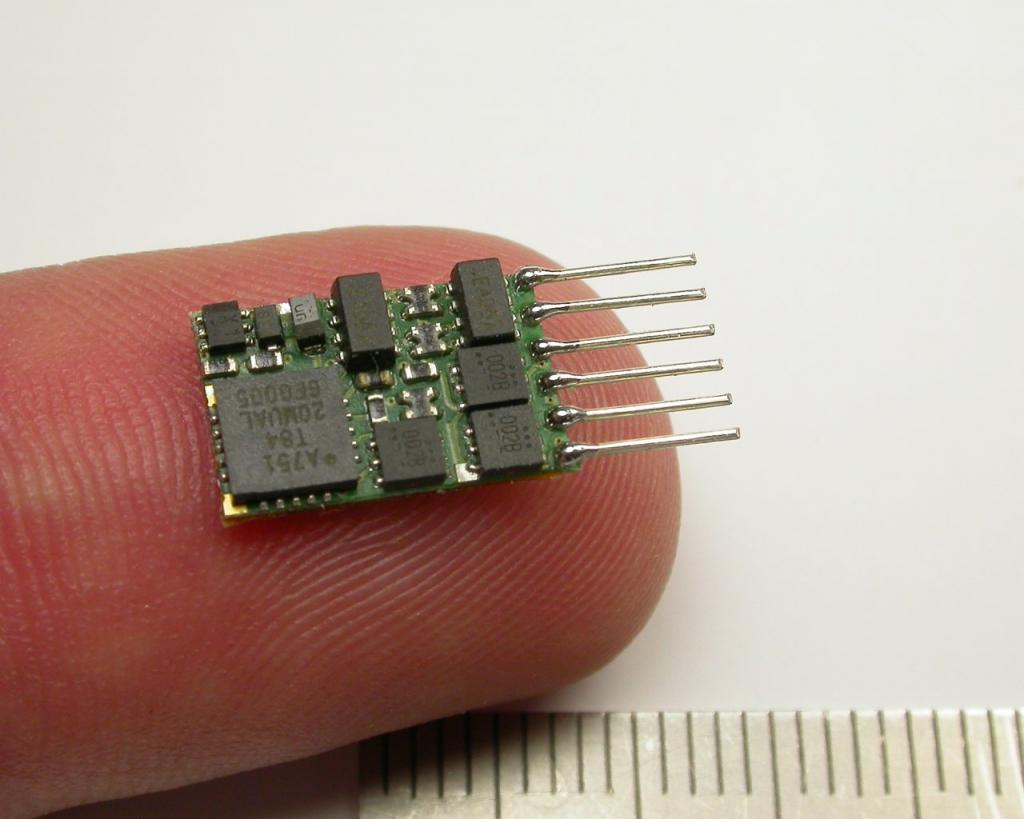
Wie schon erwähnt, muss es eine 100 %ige Trennung von Fahrbahn- und Motorstrom geben und nicht mal für den Bruchteil einer Sekunde darf da Kontakt entstehen. Das führt zur sofortigen Zerstörung des Decoders.
Bei den Flachankern sind aber die Zuleitungen zu den Motorkohlen unter dem Chassis, nur wenige Millimeter von den Fahrbahn-Stromleitern entfernt. Ein falsches Aufsetzen des Fahrzeugs auf die Fahrbahn, ein Rutscher in einer Kurve, oder auch ein abgesprungener Reifen können sehr schnell zur Zerstörung des Decoders führen. Vielleicht auch mal ein winziger Metallsplitter, der aus irgendeinem Grund auf der Fahrbahn liegt.
Der Umbau von Blockmotorchassis ist vielleicht etwas leichter, dies habe ich aber nie probiert, weil ich davon zu wenige habe. Außerdem gibt es davon auch welche, wo die Trennung von Fahrbahn- und Motorstrom gar nicht so einfach ist. In den meisten Fällen ist es jedenfalls so, daß man an den Chassis Veränderungen vornehmen muß, womit diese nicht mehr im Originalzustand sind und damit praktisch wertlos werden.
Bei der Suche nach Lösung dieses Problems kam ich dann zum 3-D-Druck, und schon bald hatte ich erste Chassisentwürfe konstruiert. Nach einigen Fehlversuchen konnte ich dann tatsächlich ein Chassis entwickeln, mit dem eine Digitalisierung problemlos möglich ist. Gleichzeitig konnte ich mit diesen Eigenbauten natürlich auch andere Karosserien mit unterschiedlichen Radständen einsetzen.
Nach einigen Fehlversuchen ergab sich dann doch ein recht brauchbares Chassis.
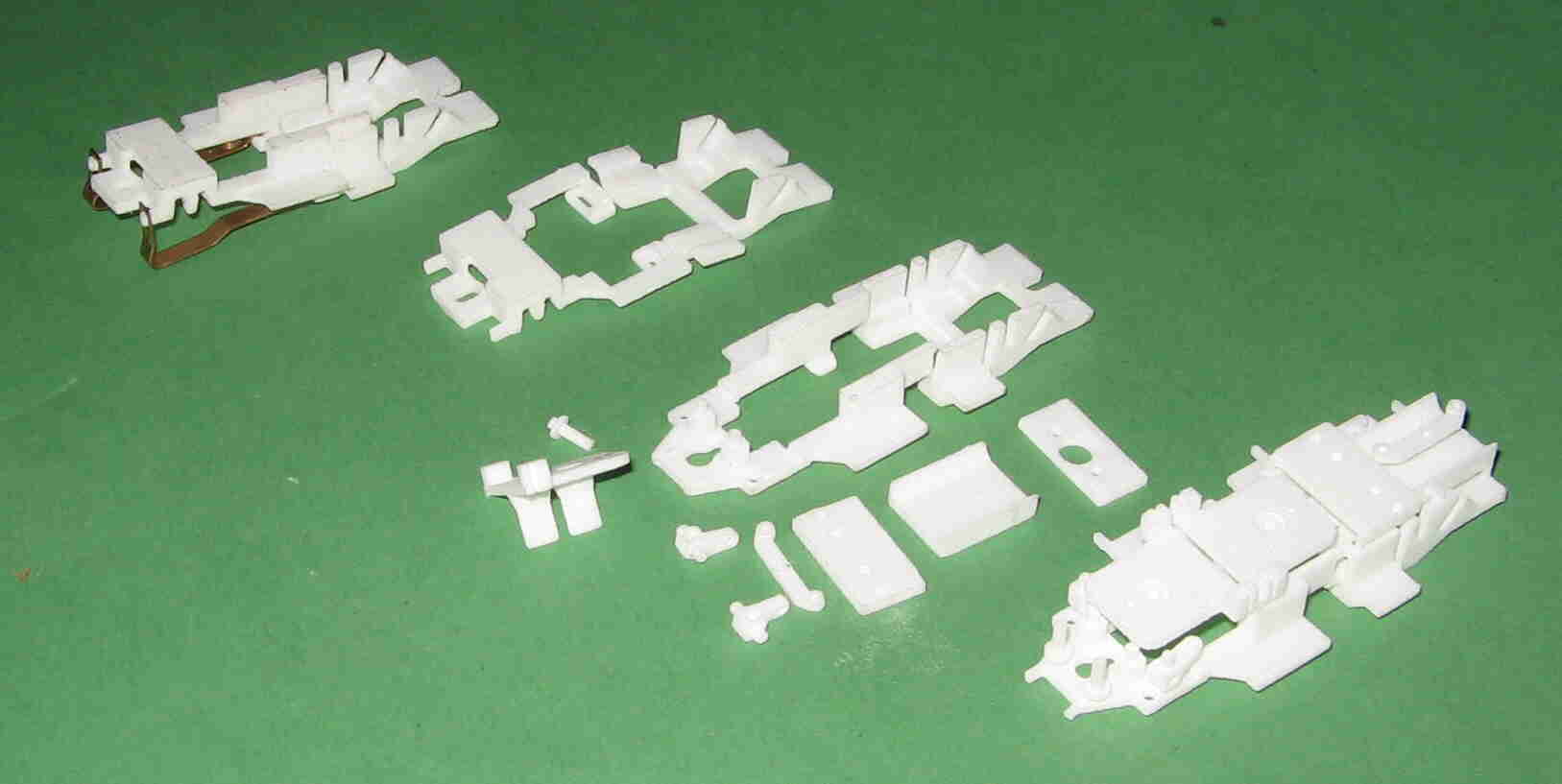 Bild in Lightbox öffnen (open image in lightbox). Verschiedene Fehlversuche
Bild in Lightbox öffnen (open image in lightbox). Verschiedene Fehlversuche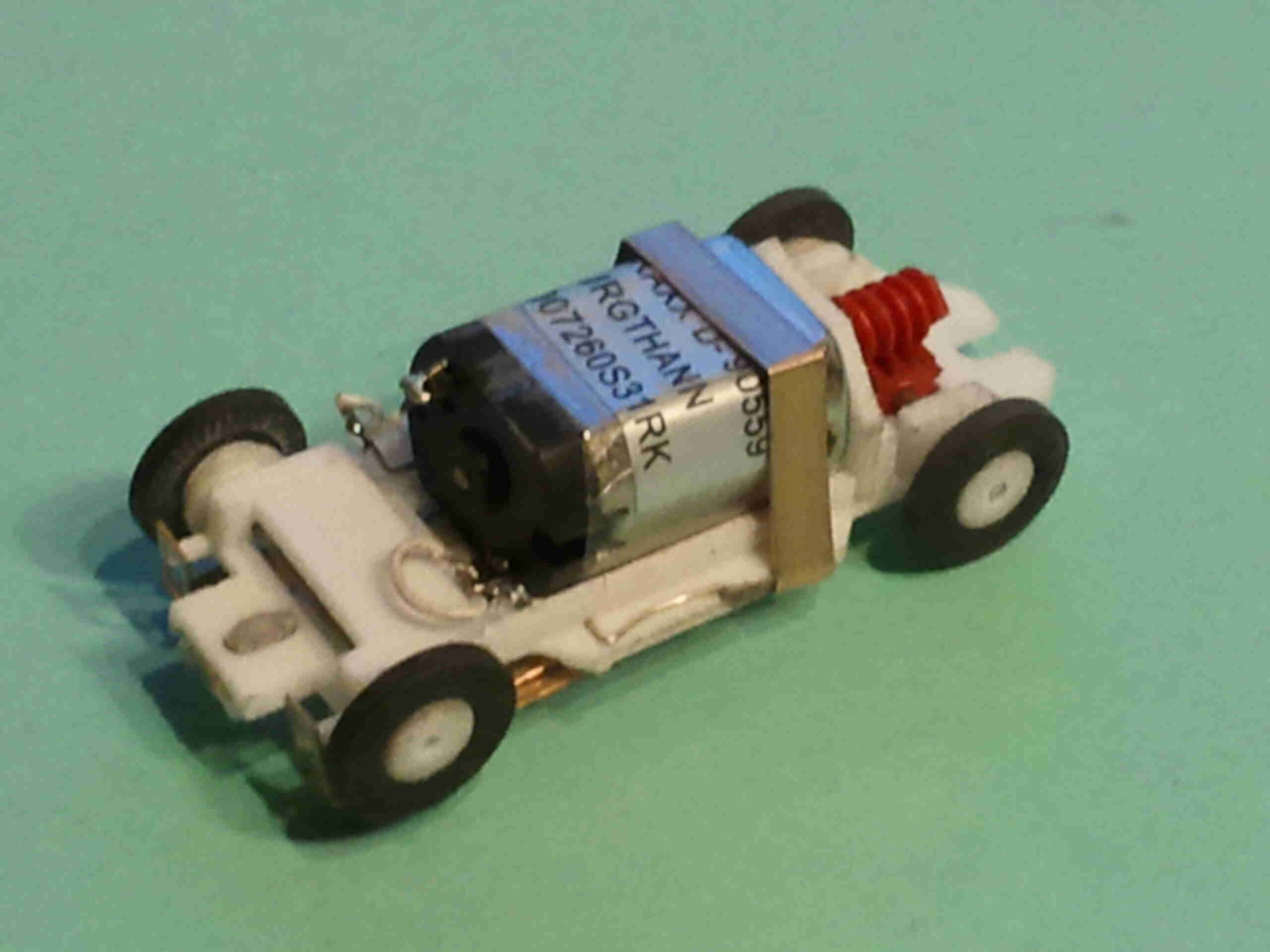 Bild in Lightbox öffnen (open image in lightbox). Chassis 1. Ausführung
Bild in Lightbox öffnen (open image in lightbox). Chassis 1. AusführungEndlich war es möglich, mehrere Fahrzeuge unabhängig auf einer Spur zu steuern, und das mit einer Geschwindkeit, die ich mir für den Stadtverkehr vorstellte. Die Freude wurde aber schnell getrübt, als ich merkte, daß es weiterhin massive Probleme bei den Stromabnehmern gab. Bei der Suche nach Lösungen kam ich auch zu den Litzenschleifern, wie sie von manchen Slotcar-Herstellern verwendet werden. Das bringt zwar eine Verbesserung, ist aber in Verbindung mit den scharfkantigen Stromleitern der Faller-Fahrbahn recht verschleißanfällig. Erst das Überkleben der Faller-Stromleiter mit schmalen Streifen von Alu-Klebeband brachte dann Erfolg.
Leider ist bei Verwendung von Litzenschleifern ein Rückwärtsfahren kaum möglich.
Nun kamen meine Autos mit angemessener Geschwindigkeit gut voran, jedoch stellte sich jetzt heraus, daß sie in engen Kurven ziemlich untersteuern. Gerade breitere Fahrzeuge wie LKW mit Doppelbereifung oder solche mit zu langem Radstand (über 40 mm) geraten dadurch in engen Kurven mit dem Heck auf die Gegenfahrbahn und können mit entgegenkommenden Autos zusammenstoßen. Das ist nicht schön und kann auch dazu führen, daß diese aus der Bahn geworfen werden. Ich habe deshalb bei meiner Anlage keine 4390 oder kleiner verwendet, sondern die meisten engen Kurven aus einspurigen Fahrbahnen zusammengesetzt.